觸覺力反饋、運(yùn)動(dòng)學(xué)分析多種功能一并實(shí)現(xiàn)!TESLASUIT人體運(yùn)動(dòng)學(xué)分析驗(yàn)證
近年來,可穿戴運(yùn)動(dòng)捕捉系統(tǒng)的迅速發(fā)展,各種各樣的動(dòng)捕產(chǎn)品出現(xiàn)在市場(chǎng)中。這些系統(tǒng)使用包含加速度計(jì)、陀螺儀和磁力計(jì)的慣性測(cè)量單元(IMU)來跟蹤人體運(yùn)動(dòng),由IMU驅(qū)動(dòng)的動(dòng)捕系統(tǒng)不受實(shí)驗(yàn)室環(huán)境的限制,極大的拓展了動(dòng)捕系統(tǒng)的靈活性。TESLASUIT的運(yùn)動(dòng)捕捉功能為運(yùn)動(dòng)評(píng)估的新可能性鋪平了道路,為人類運(yùn)動(dòng)研究、訓(xùn)練和康復(fù)提供了更準(zhǔn)確、更有效的解決方案。
在本文中我們將為大家介紹由Reade康復(fù)中心和阿姆斯特丹自由大學(xué)行為和運(yùn)動(dòng)科學(xué)學(xué)院的研究伙伴進(jìn)行的一項(xiàng)研究成果,該研究有助于評(píng)估FES輔助步態(tài)訓(xùn)練干預(yù)是否可以改善不完全脊髓損傷(SCI)患者的步態(tài)功能。該研究同時(shí)也包括進(jìn)一步驗(yàn)證TESLASUIT配備的IMU能夠用于在步態(tài)分析過程中測(cè)量下肢人體運(yùn)動(dòng)學(xué)數(shù)據(jù)。
實(shí)驗(yàn)過程
研究人員對(duì)12名健康參與者在跑步機(jī)上以三種速度(1.0公里/小時(shí)、3.0公里/小時(shí)和5.0公里/小時(shí))行走時(shí),通過TESLASUIT的IMU計(jì)算的關(guān)節(jié)角度與光電系統(tǒng)(Optotrak)測(cè)量的關(guān)節(jié)角度進(jìn)行了比較。其中以1.0 km/h步行速度試驗(yàn)用于模擬SCI個(gè)體的步態(tài)模式,因?yàn)椴叫兴俣葧?huì)影響人體運(yùn)動(dòng)學(xué)和時(shí)空參數(shù)。

在TESLASUIT上放置Optotrak集群標(biāo)記
參與者在跑步機(jī)上行走,完成100步(約5分鐘)走路動(dòng)作即停止測(cè)試。TESLASUIT的IMU和Optotrak系統(tǒng)會(huì)基于每次步態(tài)試驗(yàn)開始而同步輸出數(shù)據(jù)到電腦中。
數(shù)據(jù)分析
Optotrak系統(tǒng):使用VU 3D模型計(jì)算3D標(biāo)記坐標(biāo)數(shù)據(jù)的軌跡。每個(gè)步態(tài)周期的開始和結(jié)束通過檢測(cè)腳跟接觸地面和腳尖離開地面來識(shí)別。步幅時(shí)間由同一條腿的腳跟兩次連續(xù)接觸地面之間的時(shí)間決定。實(shí)驗(yàn)中會(huì)設(shè)備會(huì)記錄參與者每邁出一步的髖關(guān)節(jié)、膝關(guān)節(jié)和踝關(guān)節(jié)角度(歐拉角)并進(jìn)行時(shí)間標(biāo)準(zhǔn)化(從初始接觸開始,0–100%)。
TESLASUIT的IMU:來自IMU的原始數(shù)據(jù)由基于OpenSim的解決方案處理,該解決方案同時(shí)也是TESLASUIT軟件包的一部分。軟件中包含具有關(guān)節(jié)運(yùn)動(dòng)學(xué)的骨骼模型,可顯示包括矢狀面中的髖關(guān)節(jié)、膝關(guān)節(jié)和踝關(guān)節(jié)的角度。步幅時(shí)間由Optotrak系統(tǒng)檢測(cè)到的腳跟撞擊決定,計(jì)算出的角度會(huì)進(jìn)行時(shí)間標(biāo)準(zhǔn)化(從初始接觸開始,0–100%)。
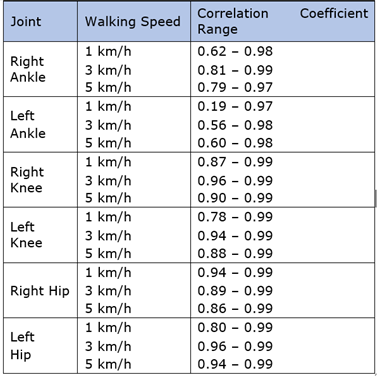
通過一維統(tǒng)計(jì)參數(shù)映射(SPM)對(duì)左右腿的踝、膝和髖角度使用雙向(系統(tǒng)x步行速度)重復(fù)ANOVA測(cè)量來評(píng)估有效性。可計(jì)算出每個(gè)參與者在每種行走速度下的左右腳踝、膝蓋和臀部角度的皮爾遜相關(guān)系數(shù)。最終報(bào)告中顯示出了在每種行走速度下左和右腳踝、膝蓋和臀部角度的最低和最高相關(guān)系數(shù)。
結(jié)果
結(jié)果顯示,TESLASUIT的IMU和Optotrak系統(tǒng)在所有行走速度下測(cè)量的膝蓋角度高度一致。膝關(guān)節(jié)角度的兩個(gè)系統(tǒng)之間的相關(guān)系數(shù)范圍從0.78到0.99。髖關(guān)節(jié)角也顯示了良好到極好的相關(guān)性,相關(guān)系數(shù)為0.80到0.99。踝關(guān)節(jié)角度則顯示出更多的可變性,系數(shù)范圍從0.19到0.99,盡管大多數(shù)參與者實(shí)現(xiàn)了高水平的相關(guān)性。
雖然相關(guān)性分析表明整體關(guān)系密切,但對(duì)關(guān)節(jié)角度波形的更詳細(xì)分析揭示了兩個(gè)系統(tǒng)之間的一些差異。與Optotrak相比,TESLASUIT的踝關(guān)節(jié)和髖關(guān)節(jié)角度在步態(tài)周期中出現(xiàn)了15到20度的偏移。這種偏移可能是由于TESLASUIT?IMU的放置位置所導(dǎo)致,因?yàn)轭愃频难芯勘砻鳎琁MU在身體上的位置會(huì)影響關(guān)節(jié)角度計(jì)算的準(zhǔn)確性。研究人員提到TESLASUIT上的骨盆IMU放置可能會(huì)導(dǎo)致髖關(guān)節(jié)角度不太準(zhǔn)確,而足部IMU更多地放置在中足上,可能會(huì)導(dǎo)致踝關(guān)節(jié)角度的偏移。
盡管存在這些位置的數(shù)據(jù)存在一些差異,驗(yàn)證研究結(jié)果對(duì)于使用TESLASUIT分析步態(tài)中的下肢人體運(yùn)動(dòng)學(xué)仍是有希望的。雖然在TESLASUIT上放置IMU位置還需一些改進(jìn)(以提高臀部和腳踝角度的準(zhǔn)確性),但目前報(bào)告中顯示的膝蓋角度數(shù)據(jù)仍具有較高的有效性。對(duì)于許多應(yīng)用來說,膝關(guān)節(jié)數(shù)據(jù)擁有這種精度水平已經(jīng)足夠。TESLASUIT在傳統(tǒng)實(shí)驗(yàn)室環(huán)境之外的便攜性和可用性也為在更自然、真實(shí)的環(huán)境中進(jìn)行動(dòng)作捕捉提供了機(jī)會(huì)。
通過對(duì)IMU定位的一些修改和對(duì)TESLASUIT關(guān)節(jié)角度計(jì)算的持續(xù)驗(yàn)證,TESLASUIT可穿戴觸覺套裝有望成為步態(tài)分析和運(yùn)動(dòng)損傷康復(fù)的一個(gè)有價(jià)值,有潛力的工具。同時(shí)不受實(shí)驗(yàn)室環(huán)境限制的高精度運(yùn)動(dòng)跟蹤能力也為運(yùn)動(dòng)評(píng)估和生物觸覺反饋訓(xùn)練開辟了更多可能性。
TESLASUIT正在塑造可穿戴技術(shù)的人類運(yùn)動(dòng)研究和治療用例的未來。
 打印本文
打印本文 關(guān)閉窗口
關(guān)閉窗口